ROSY LS
Robot Optimization System mit Lichtschnittsensor / Profilsensor
Unseren Leistungsumfang finden Sie auf unserer Hauptseite.
ROSY LS
Robot Optimization System mit Lichtschnittsensor / Profilsensor
ROSY LS
ROSY - Robot Optimization System
Basierend auf Kundenanforderungen und eigenen Erfahrungen sowie eigenen Bedürfnissen, hat teconsult das bewährte Mess- und Kalibriersystem ROSY neu entwickelt.
Unsere ROSY ist ein hochpräzises Messsystem für den Einsatz in der Robotik. Neben der Masterung von Robotern und der Werkstück- und Werkzeugvermessung ist auch das Einmessen externer Achsen möglich. Hauptbestandteile der ROSY sind ein Sensor, ein modulares Befestigungssystem und ein entsprechendes Softwarepaket. Die Auswahl der Hard- und Softwarekomponenten ergibt sich aus den Anforderungen Ihrer Anwendung.
Die Messungen werden prozessnah in der Arbeitszelle durchgeführt. ROSY kann flexibel in der Zelle oder am Roboter montiert werden.
Überschreiten nach einer Genauigkeitsprüfung des Robotersystems die ermittelten Abweichungen von den Prozessanforderungen oder sind die Anforderungen an die Genauigkeit des Roboters sehr hoch, kann die Roboterkalibrierung/Masterung eingesetzt werden.
ROSY ermöglicht die Erhöhung und Überprüfung der Genauigkeit von Industrierobotern.
ROSY ist ein Servicetool in einem tragbaren Koffer. ROSY wird ebenso als Inlinetool eingesetzt werden.
Eigenschaften
Schnittstellen
Software
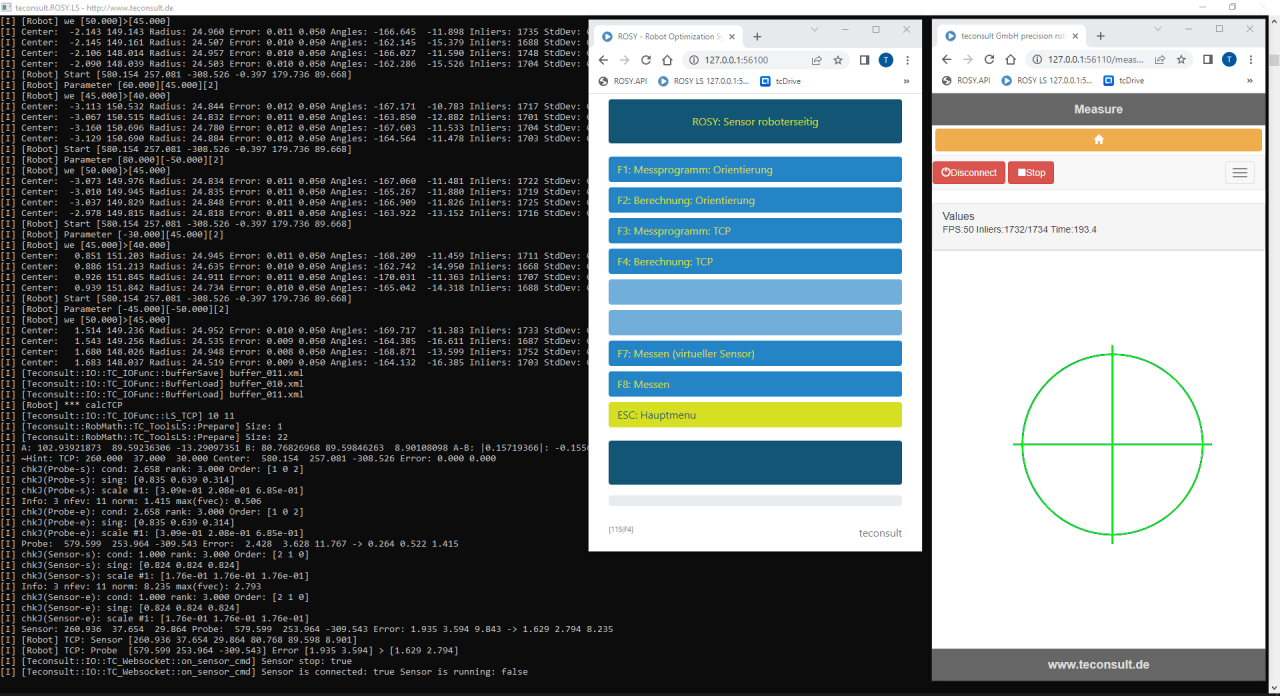
Webinterface und Konsolefenster mit Logmeldungen
Alleinstellungsmerkmale ROSY LS
Webgui
Optionales Webinterface
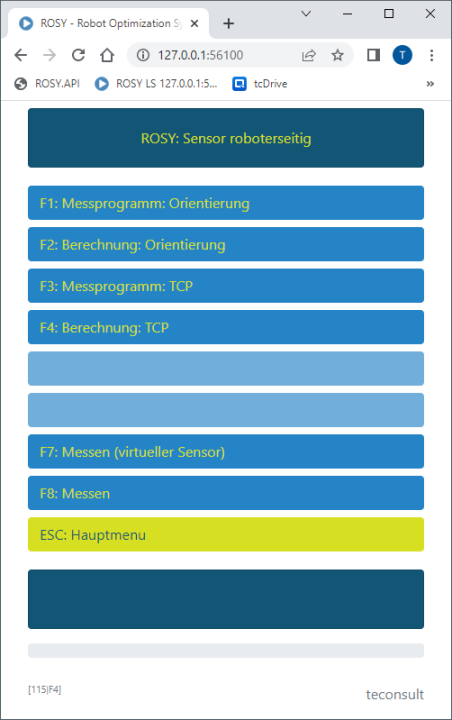
Über das Webgui kann die Robotersoftware bedient werden. Eine Integration für den Automatikbetrieb ohne Menü ist möglich.
Hauptmenü
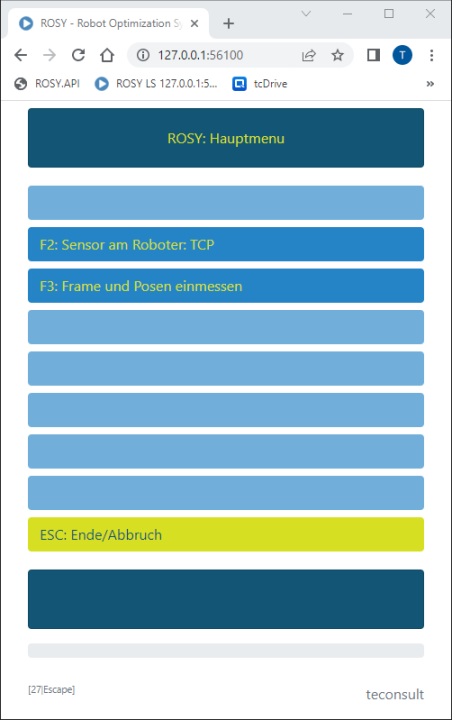
Menü: Ermittlung Sensor-TCP
Menü: Ermittlung Frame

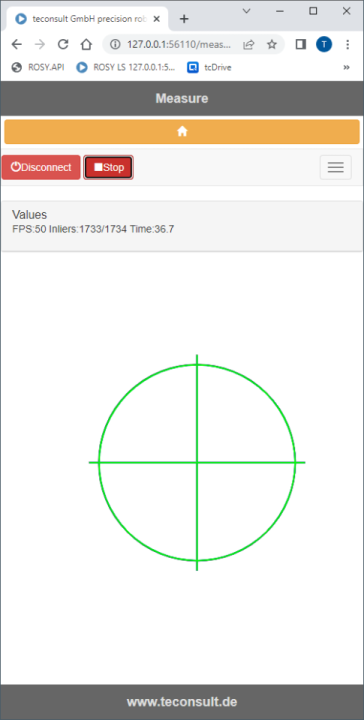
Menü: Fadenkreuz zur Teachhilfe
TCP-Vermessung
Vermessung des Roboter-TCPs und des raumfesten Sensors
Base-Vermessung
Ermittlung der Position und Orientierung des Bauteils bezüglich der Roboterbasis
Diagnose
Überwachung des Roboters
Wiederherstellung
Wiederherstellung des Roboters nach einem Crash
Results of the workshop at DENSO in Germany
April 2021
The new ROSY LS was presented. DENSO robots of the types VS050 and Cobotta were calibrated.
ROSY LS für DENSO
The new version of our calibration system.
With ROSY industrial robots are calibrated and their environment measured. According to a holistic approach ROSY measures robots, grippers, workpieces and external axes.
Measurements are carried out close to the process on the shop floor. ROSY can be flexibly mounted in the cell or on the robot.
Based on customer requirements and own experiences as well as own needs, teconsult has the proven measuring and calibration system ROSY new developed.
Exceed after an accuracy check of the robotic system the determined deviations from process requirements or are the requirements for accuracy of the robot is very high, the robot calibration can be used.
ROSY enables the increase of the absolute accuracy of industrial robots.
ROSY is a service tool in a portable case and is available for services from teconsult at the end customer's site.
Interface
There is a web interface for setup. Communication with the controller takes place via an ORIN provider. This provider is implemented prototypically as a b-Cap server.

Setup
The sensor is mounted stationary. No cables are moved along.

Performance Overview
Sensor and probe
We use a hight precision light section sensor. The ball probe is attached on the robot.

The Unique Advantages of ROSY LS
Calibration of a DENSO VS050
using the new ROSY LS.

Video DENSO VS050
Results
The time for the measurement is less than 5 minutes. A total of about 80 measurement poses were approached. The mean error could be improved from 4.784 to 0.057mm. The maximum error from 8.040 to 0.148mm.
Time for Measurement:
5 minutes
Improvement of the mean error
4.784 to 0.057mm
Improvement of the maximum error
8.040 to 0.148mm
Calibration of a DENSO Cobotta
using the new ROSY LS.

Video DENSO Cobotta
Results
The time for the measurement is less than 2 minutes. A total of 34 measurement poses were approached. The mean error could be improved from 0.978 to 0.132mm. The maximum error from 1.925 to 0.336mm.
Time for Measurement:
2 minutes
Improvement of the mean error
0.978 to 0.132mm
Improvement of the maximum error
1.925 to 0.336mm
ROSY LS mit scanCONTROL von Micro-Epsilon
Juni 2022
Versuche zur Integration und Vermessung am Stäubli CS8 TX 60L.
Zielsetzung
Vermessung des Sensor-TCPs
Ermittlung der Sensorposition und Sensororientierung bezüglich des Roboterflansches.
Vorgehensweise
Ergebnis
Als Ergebnis wird die Position und Orientierung des Sensors bezüglich des Roboterflanschses dargestellt (TCP: Sensor). Die Beschreibung erfolgt in der Euler-Konvention der jeweiligen Robotersteuerung.
Es wird ebenfalls die Position der raumfesten Probe ermittelt (TCP: Probe).
Der Fehler (Error) beschreibt den mittleren und maximalen Fehler der Rückprojektion vor und nach der Berechnung. Dieser Fehler liegt deutlich außerhalb des erwarteten Bereichs (<0.500mm) und spiegelt die derzeitige Genauigkeit des Roboters wieder. Offensichtlich ist der Roboter starkt verstellt und zumindest die Nulllagen sollten neu eingestellt werden.

Video Sensor-TCP
Vermessung der Vorrichtung (Framevermessung)
Ermittlung des Bezugssystem bezüglich der Roboterbasis.
Vorgehensweise
Ergebnis
Als Ergebnis wird die Position und Orientierung des Frames bezüglich der Roboterbasis ermittelt. Die Beschreibung erfolgt in der Euler-Konvention der jeweiligen Robotersteuerung.
Video Framevermessung
Teachen der Referenzposen
Automatisches einmessen bezüglich Frame der Vorrichtung.
Vorgehensweise
Ergebnis
Als Ergebnis wird die Position uns der jeweiligen Referenzkugel im Frame der Vorrichtung ermittelt.
Video Teachen
Verschieben der Vorrichtung
Die Vorrichtung wurde verdreht und verschoben.
Ergebnis mit der unvermessenen Vorrichtung
Die Referenzposen 0, 1 und 2 wurden neu Vermessen und mit den alten Positionen verglichen. Die maximale Abweichung ist über 35mm.

Video Framevermessung nach Verschiebung
Test nach dem erneuten Einmessen der Vorrichtung
Ergebnis nach dem erneuten Einmessen des Frames
Als Ergebnis wird die Position uns der jeweiligen Referenzkugel im Frame der Vorrichtungermittelt.

Video Testen der Referenzkugel nach dem erneuten Einmessen des Frames