ROSY Tracker
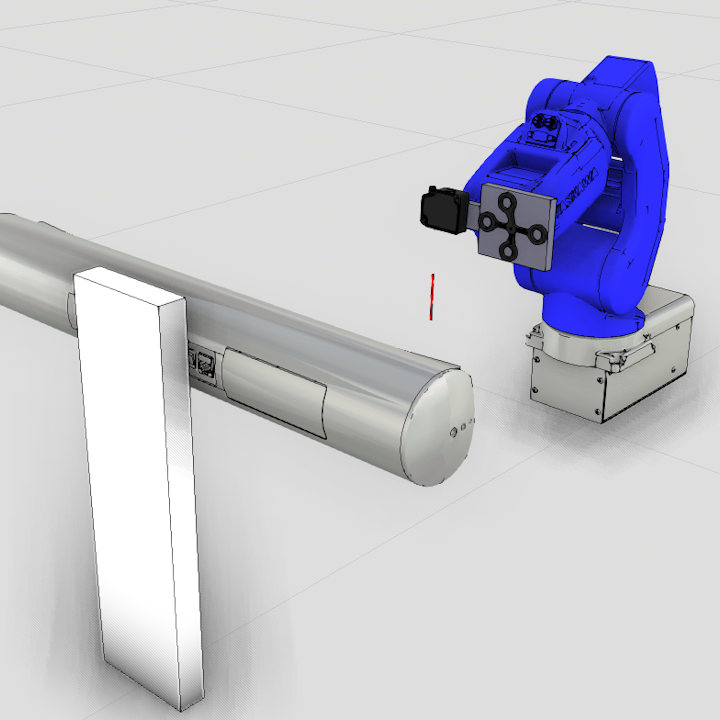
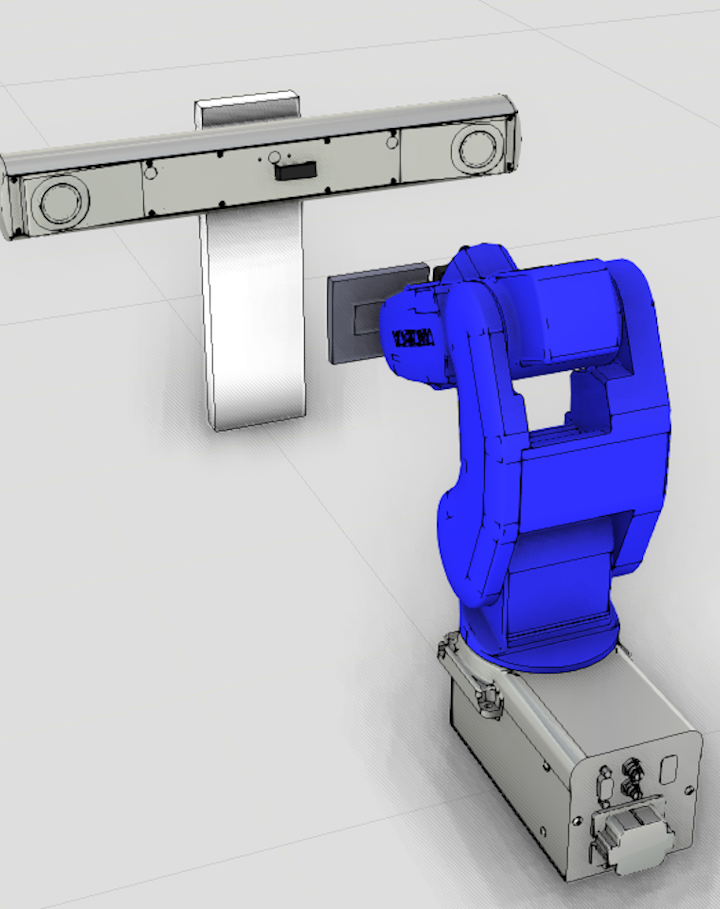
Robot Optimization System mit Stereokamerasystemen und Lasertrackern
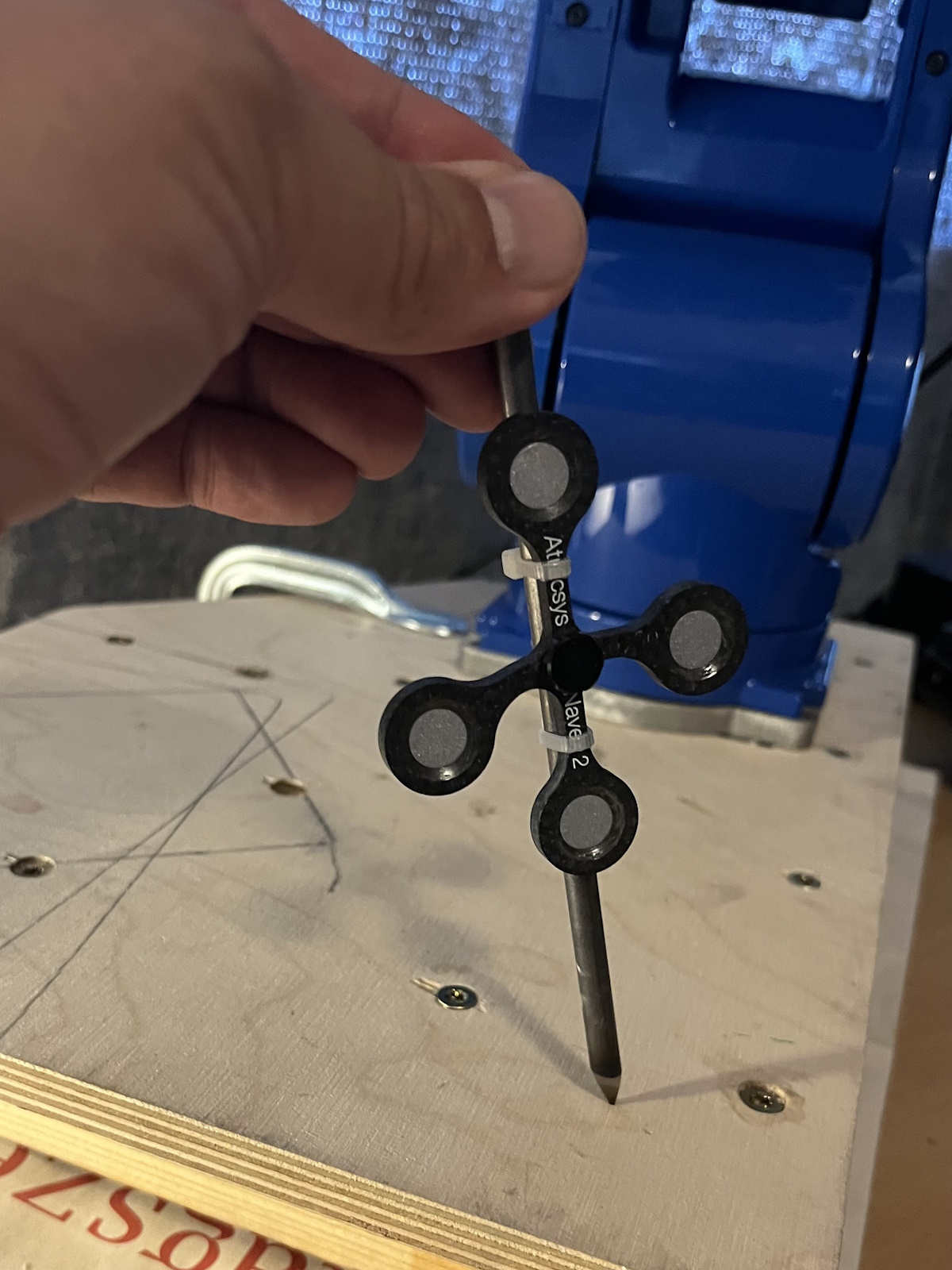
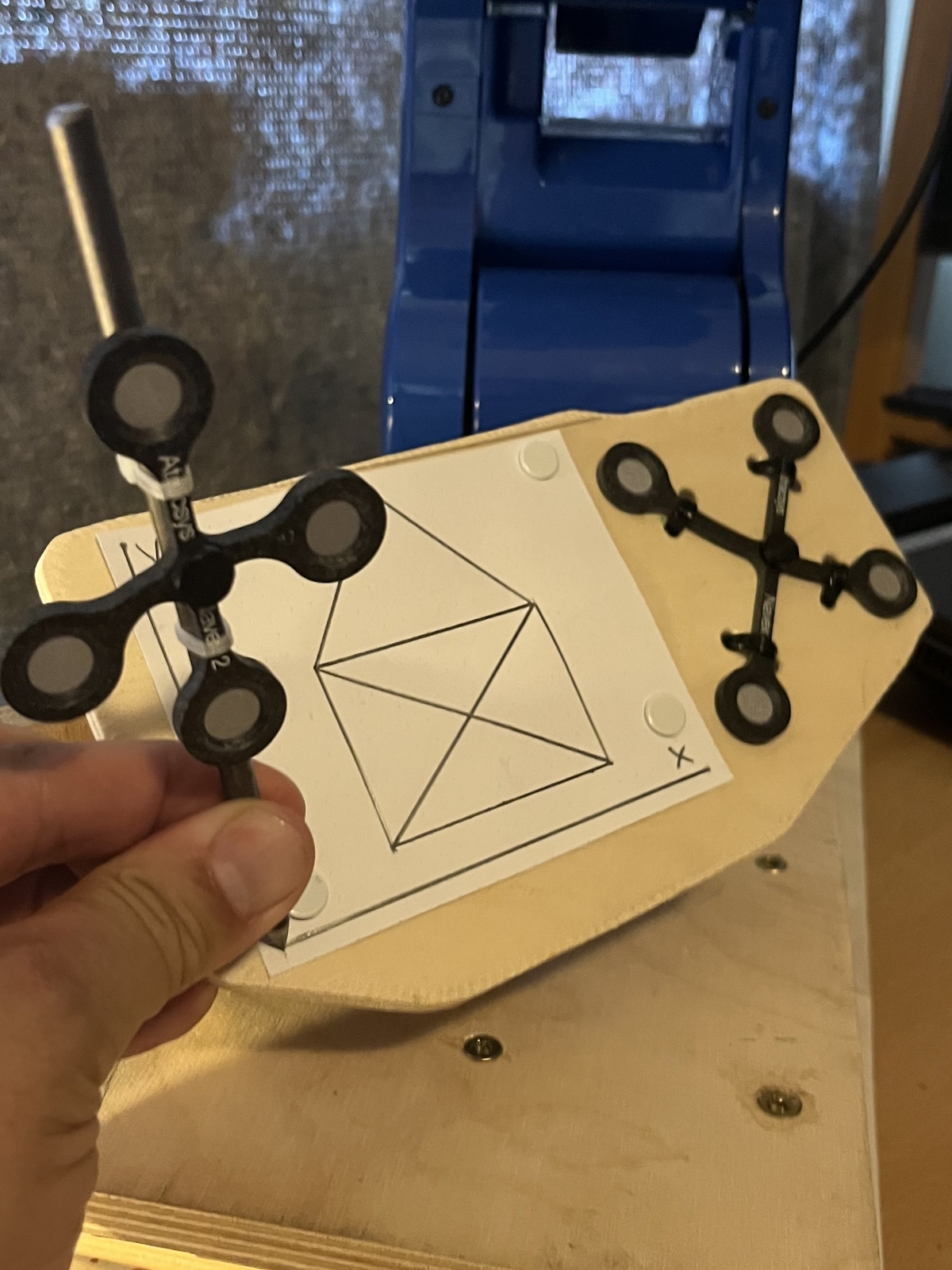
Die Genauigkeitssteigerung erfolgt durch externe Messysteme. Der Absolutgenauigkeit des Roboters hat dadurch keinen Einfluss auf die Prozessgenauigkeit.
Unseren Leistungsumfang finden Sie auf unserer Hauptseite.